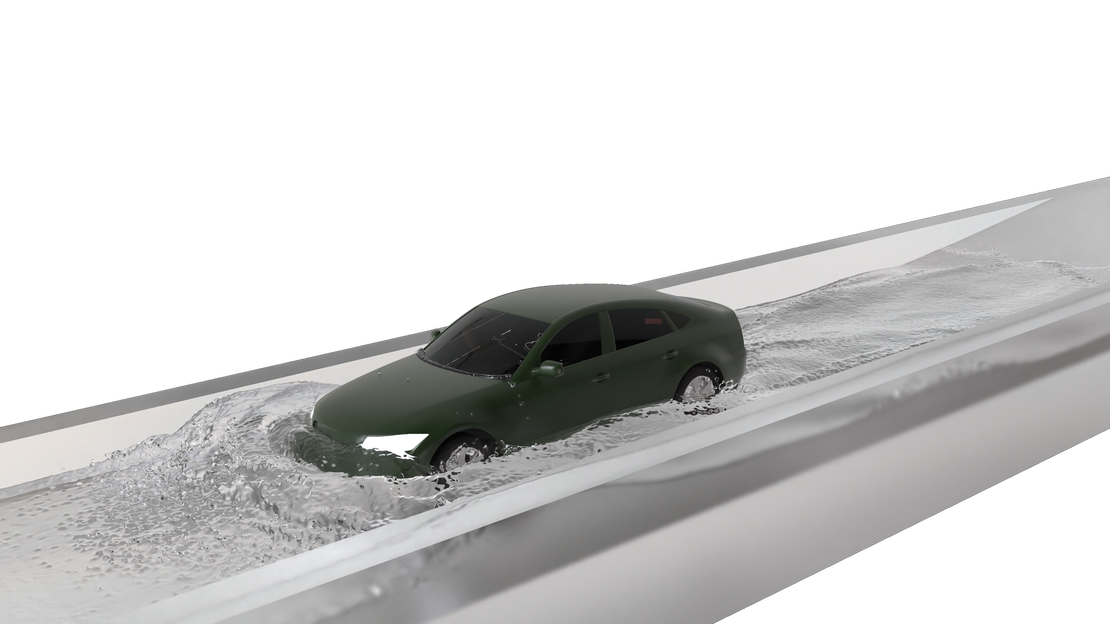
在汽车工业中,涉渡指的是车辆以低速行驶穿过较深水域,如渡河或在洪水泛滥的道路上行驶。 车辆能安全涉渡的深度至关重要,其测量标准是轮胎接触点与发动机进气系统之间的距离。 这一数据的测量至关重要,能够防止水进入发动机,并在进行此类操作时有效保护发动机免受损害。
案例描述
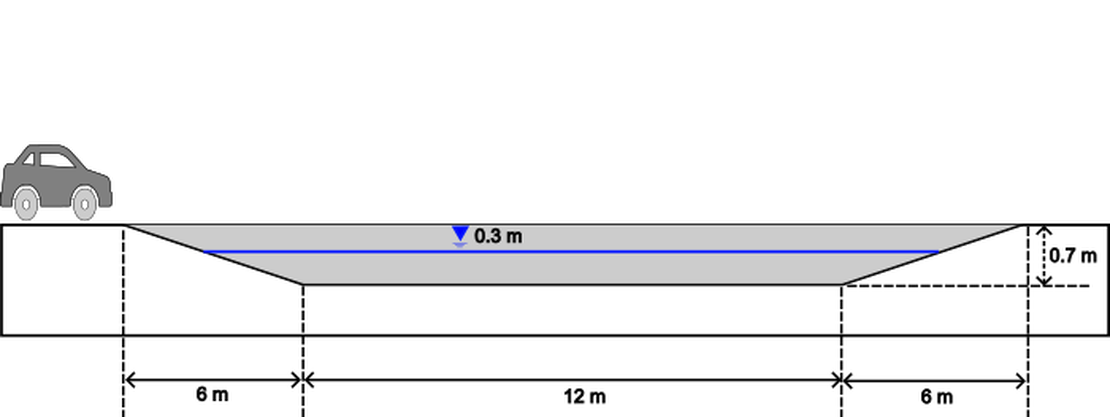
本案例将对上述涉水场景进行仿真。 模拟过程中,车辆将行驶于深度为30厘米的水道中。 该水道的具体尺寸已在下图中详细展示。 本次仿真设置两种车速:2 m/s(约7 km/h)及3.33 m/s(12 km/h)。
模型设计
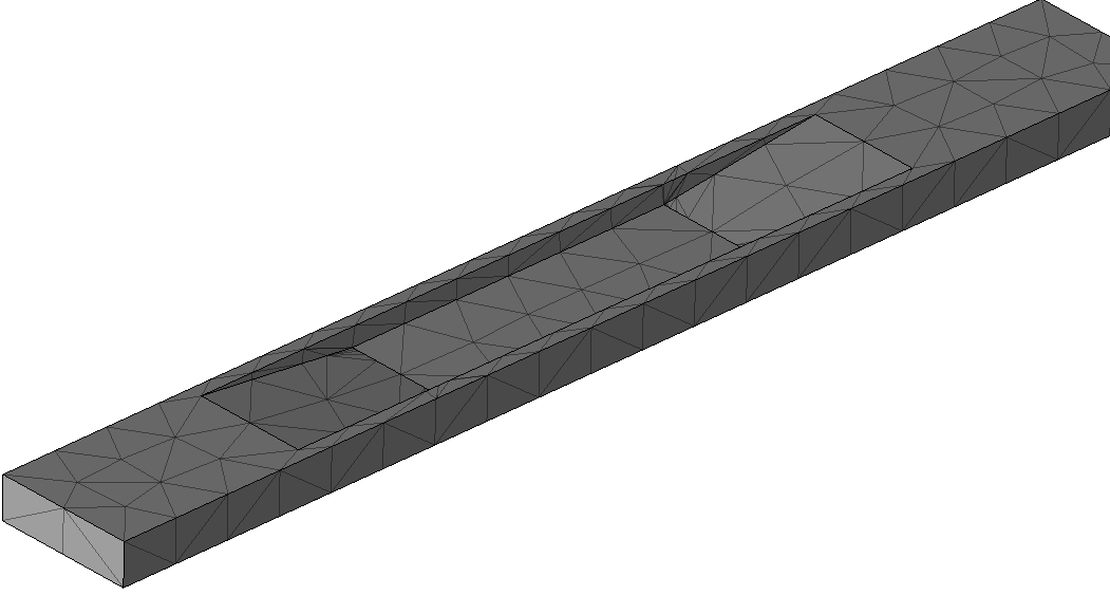
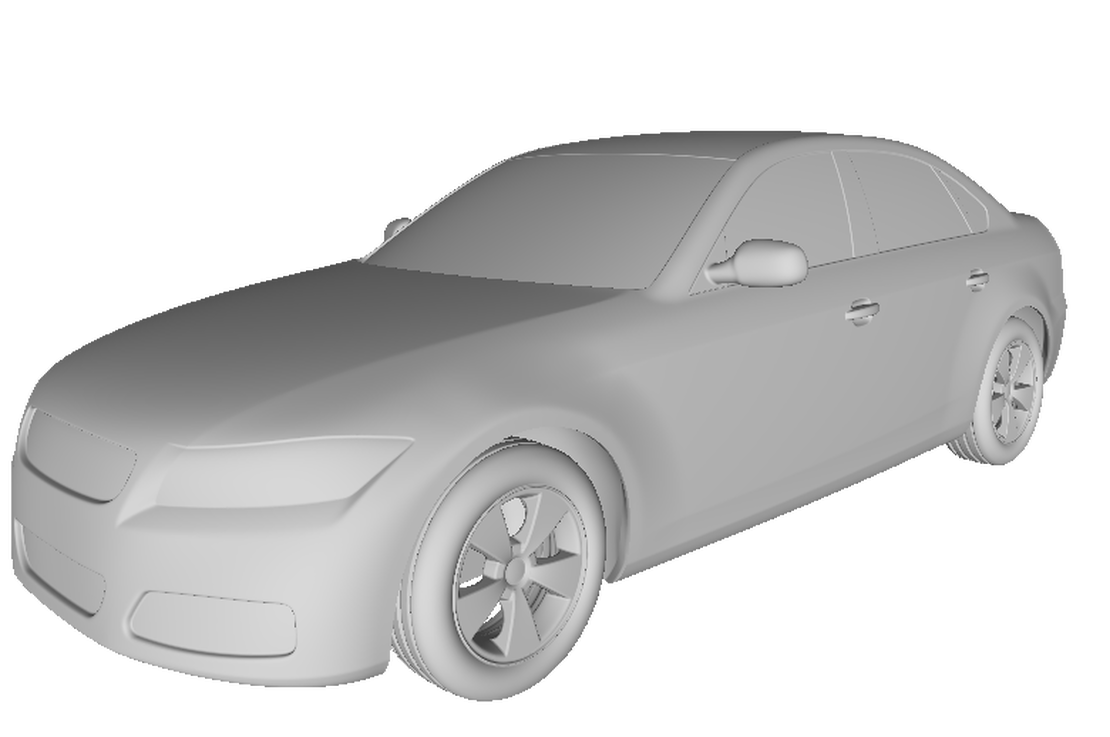
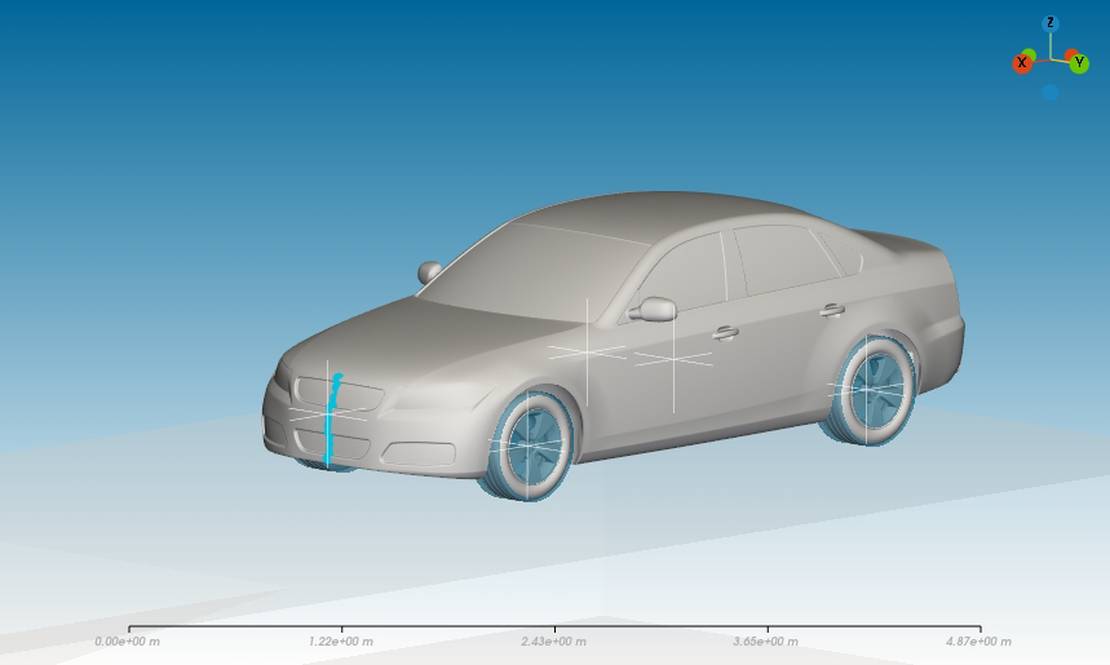
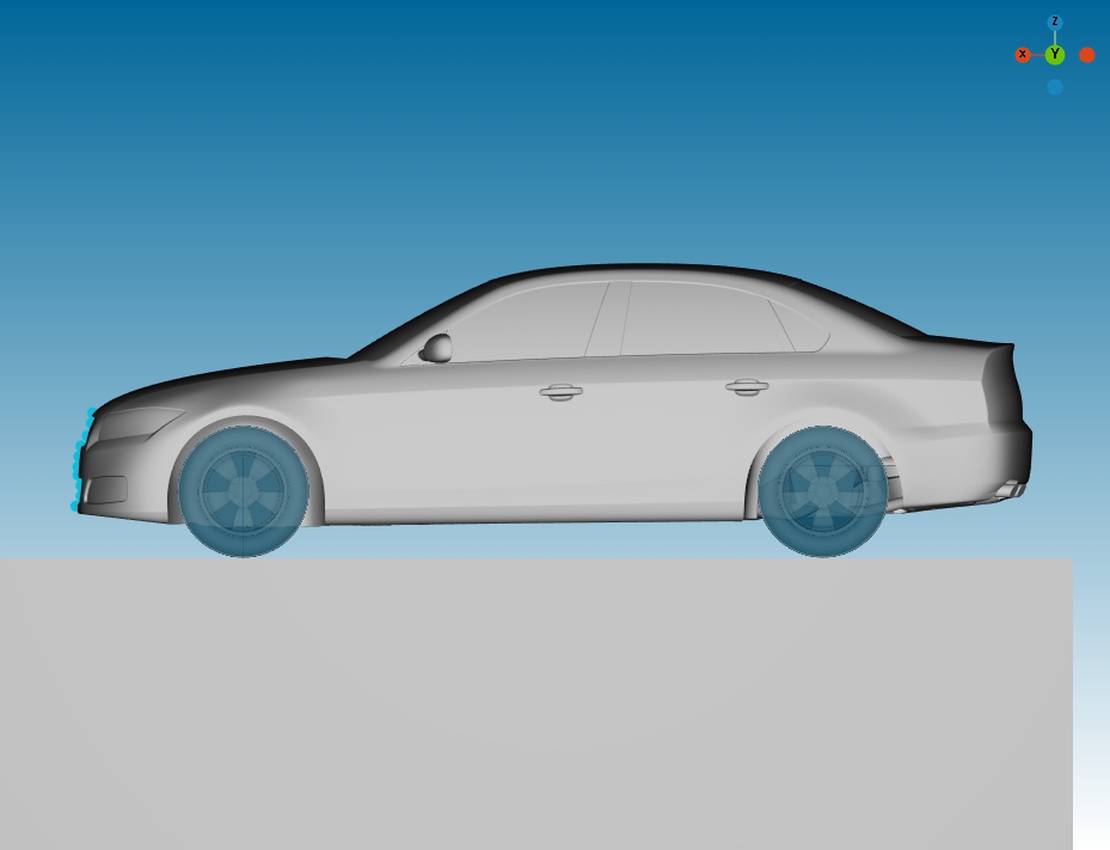
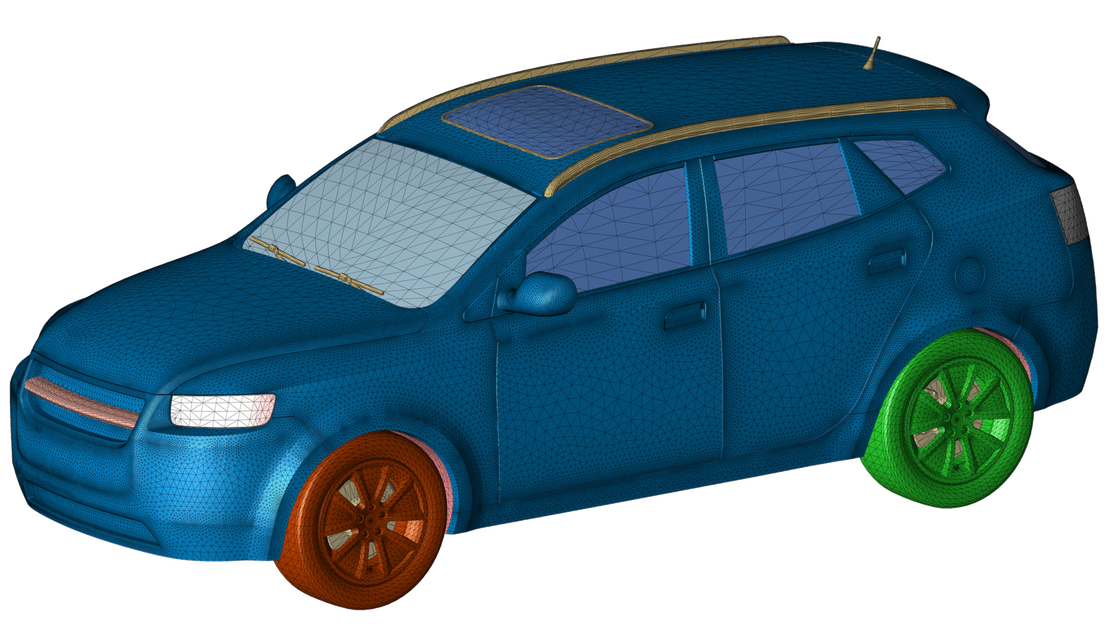
案例中的水道几何结构是基于上述草图,通过shonMesh生成的表面网格。而车辆的几何结构采用的是DrivAer模型。该模型由德国慕尼黑工业大学空气动力学与流体机械研究所开发。 作为一种通用化表示形式,旨在填补过度简化的模型(如Ahmed车身)和复杂量产车之间的技术空白。 对于本次仿真,DrivAer模型采用了以下配置:
- 三厢轿车的顶部设计
- 详细底盘结构
- 后视镜
- 车轮
如下图所示:可以看到 STL 文件以及水道的网格。
案例设置
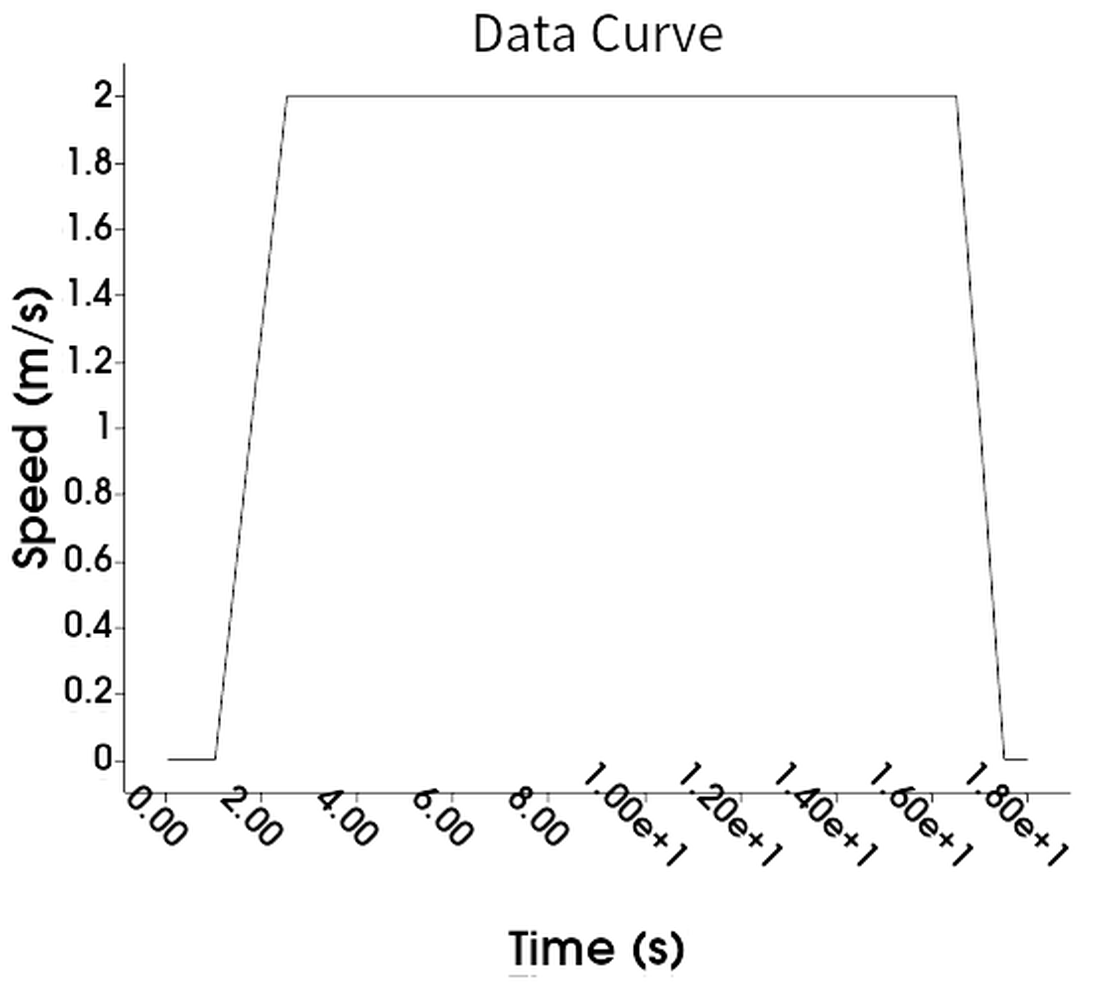
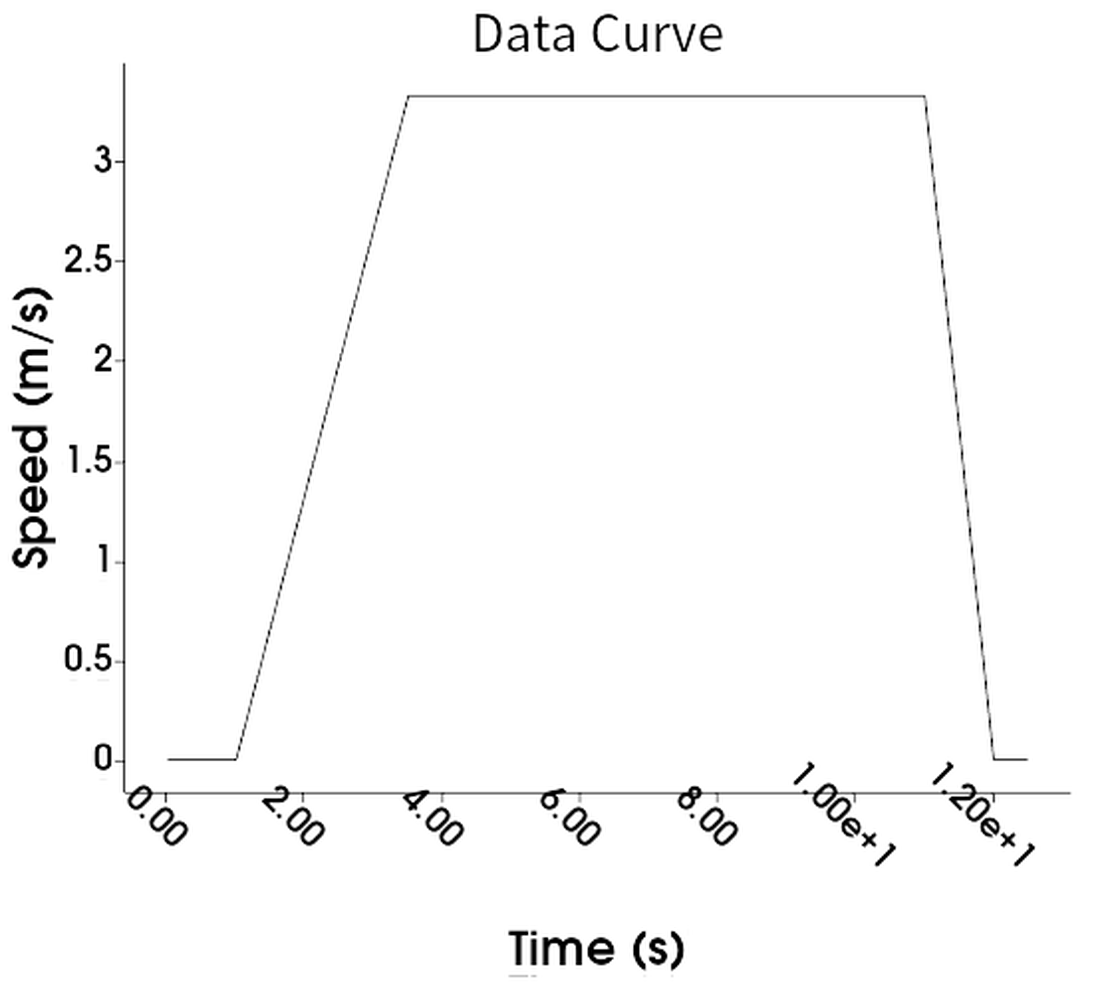
在第一次仿真中,汽车于1秒后开始移动,从0加速至2 m/s,耗时2.5秒,随后以该速度匀速行驶15秒,并在第18秒停止。 因此,总计算时间为18秒,代表汽车完全通过整个水道所需的时间。 在第二次仿真中,由于车速加快至3.33 m/s,车辆仅使用12.5秒即可通过水道,所以整体需要仿真的物理时间更短。 精确的速度曲线可参考下图所示的图表。
在两个仿真中,液体区域的设置保持一致:水道内总共有 15.943 m3的液体,相当于 30 厘米的高度。 在此仿真中,使用了半径为 1.26 cm的流体粒子,共生成了 100 万个粒子。
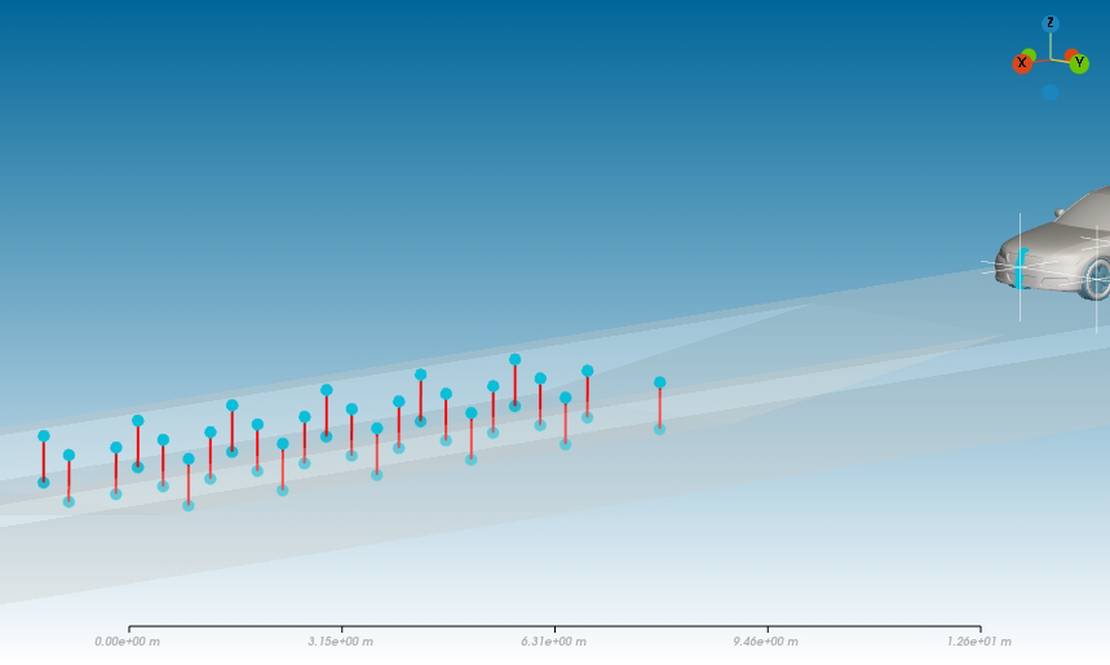
此案例采用了多种采样方法,包括:
- 车中心线上的采样点
- 车轮周围的采样区域
- 水道内的采样线
这些采样如下图所示。
仿真结果
仿真的总体情况展示在下方视频中。 上一行显示的是慢速行车结果,下一行则显示是快速行车结果。 两个俯视图 (右侧的视频) 清晰地展示了前方波浪扩散的差异:浅水中的表面波速度可以用以下公式近似计算
其中g是重力加速度,而h则是水的深度。
在这段视频中,对于较慢的汽车,在坡道上(水较浅的地方),波速小于车速;因此,波峰始终位于汽车前方。 而在水道底部(水更深的地方),波速略大于车速,因此波会超过汽车。 在第二个仿真中,汽车的速度始终快于波的传播速度,因此波峰始终位于汽车前方。
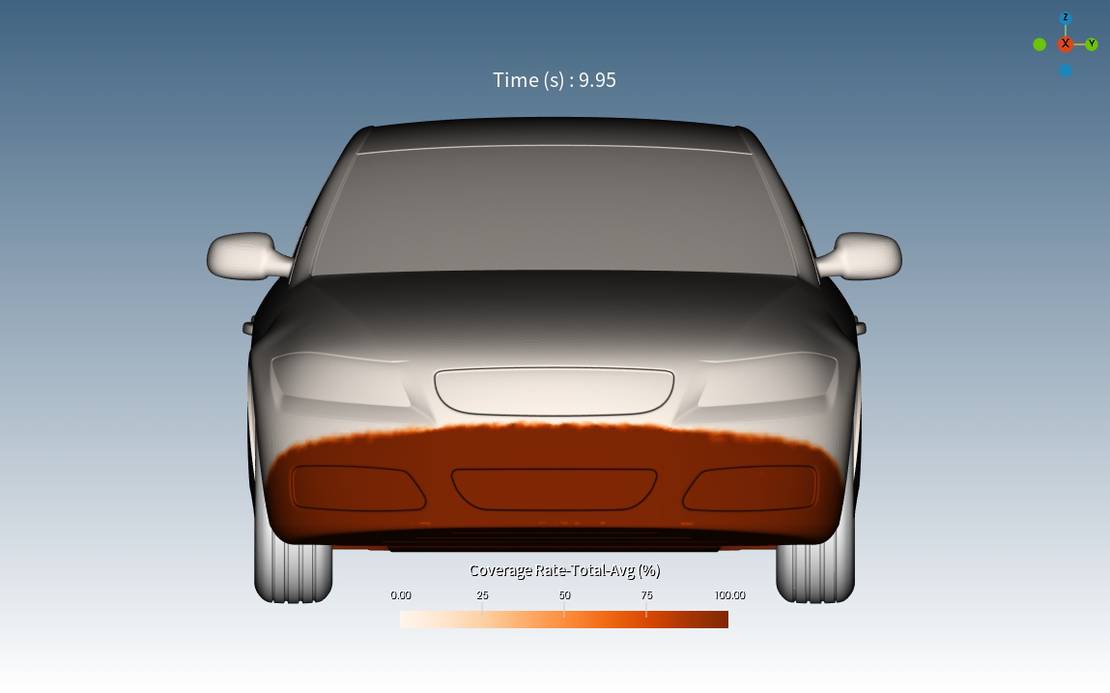
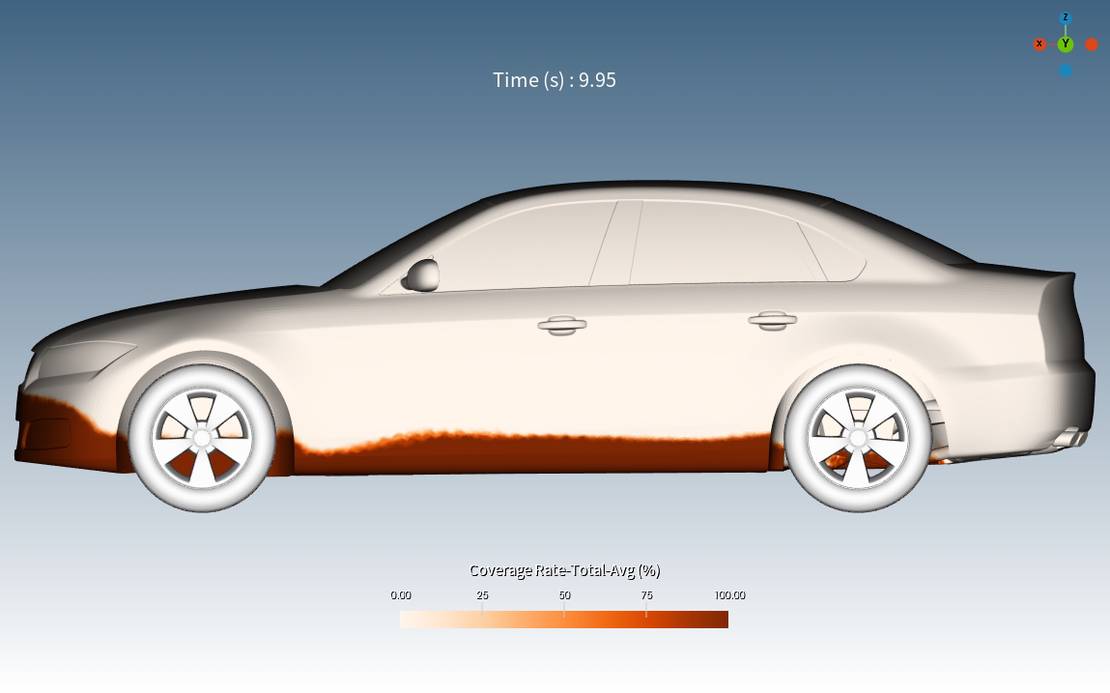
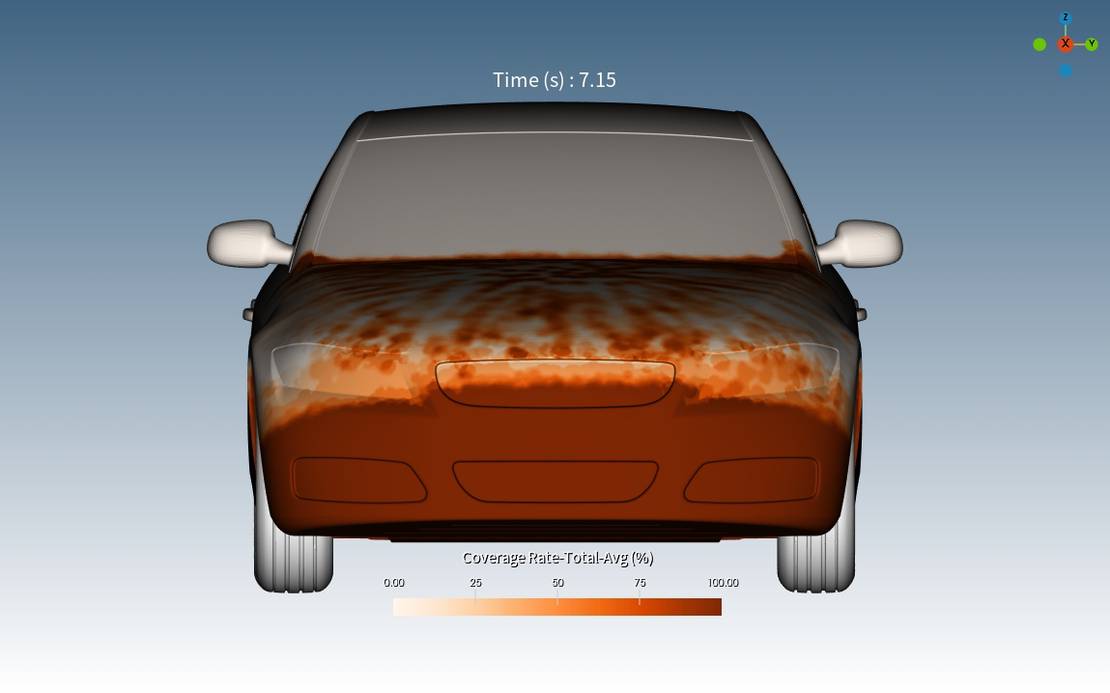
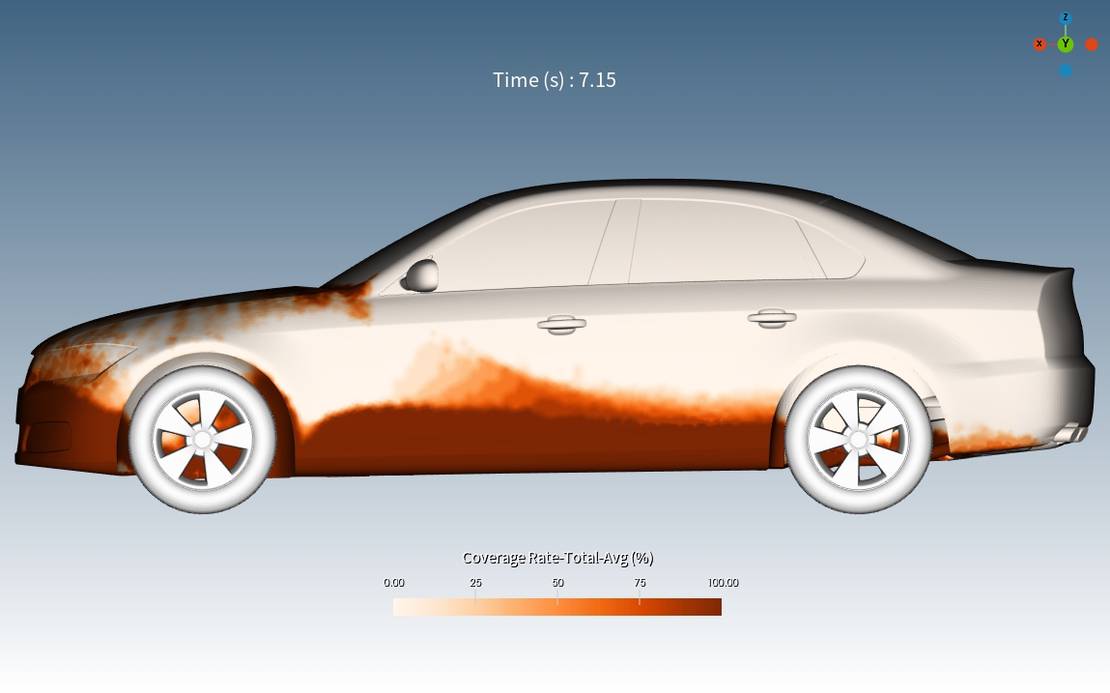
以下图片展示了汽车上的覆盖率。 此处,shonDy 的内置时间平均滤波器被用于可视化当前值(在这种情况下为覆盖率),以及特定时间段内的平均值。 在所示的图表中,覆盖率是基于 0.25 秒的时间段进行平均计算的,以便更清晰地了解水是如何打湿汽车的。
同样,上一行显示的是慢速行车结果,下一行则显示是快速行车结果。 通过比较两种速度,可以看出覆盖率分布的区别。 对于行驶速度更快的车辆,它需要应对更高的水波,这导致几乎整个车头部分都受到水的覆盖。 这样可能会导致水进入发动机舱,从而堵塞空气进气口并引发发动机故障。 另一方面,对于行驶速度较慢的车辆,水仅覆盖车头的下半部分,这意味着发动机熄火的风险要低得多。 侧面视图也显示了差异:在行驶速度较快的车辆中,水位在汽车前门附近也会更高。
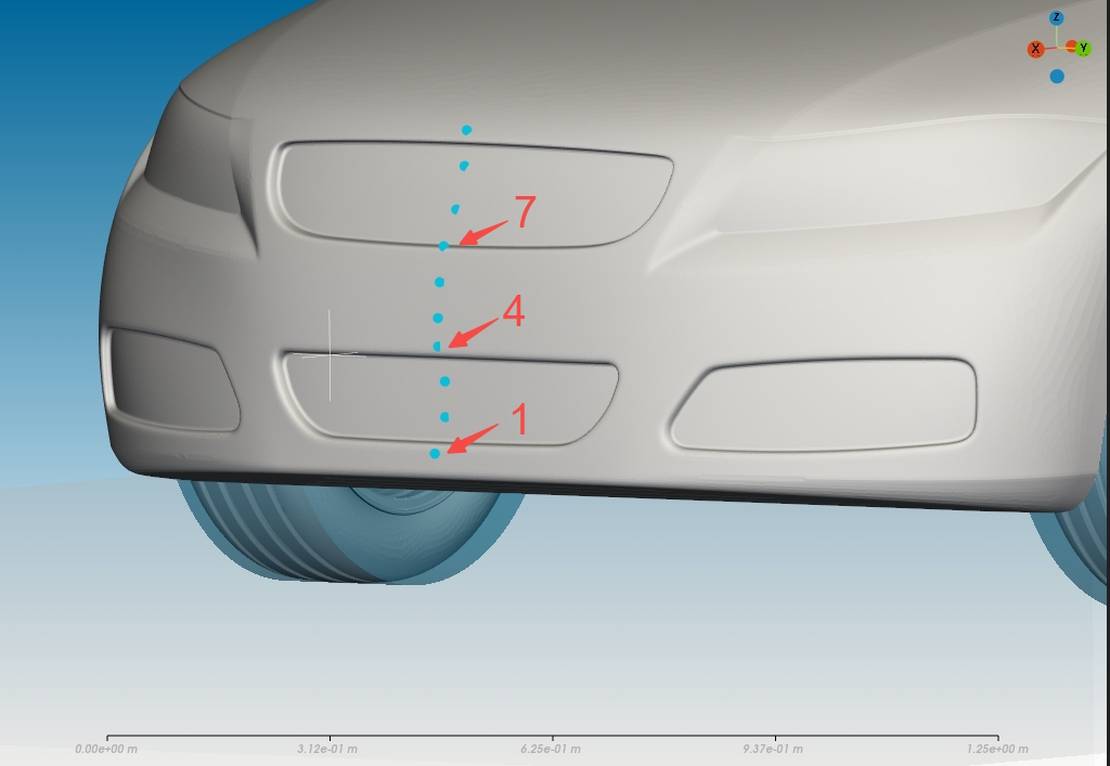
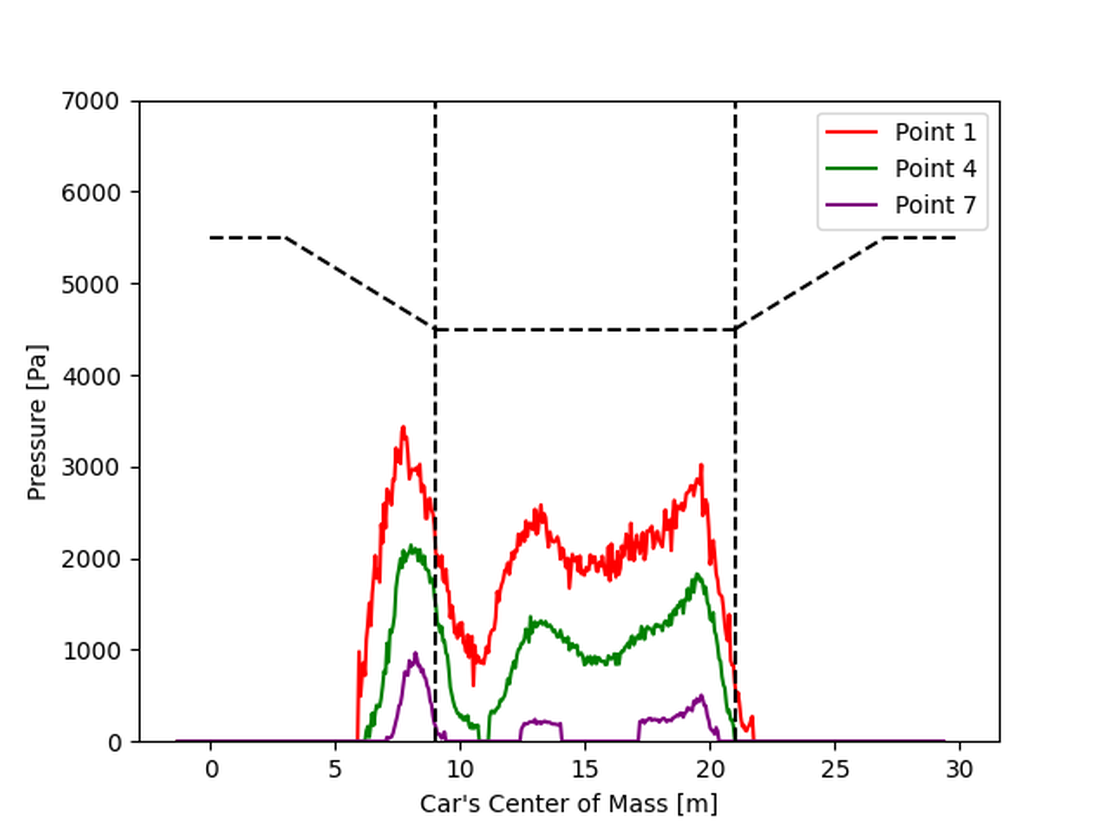
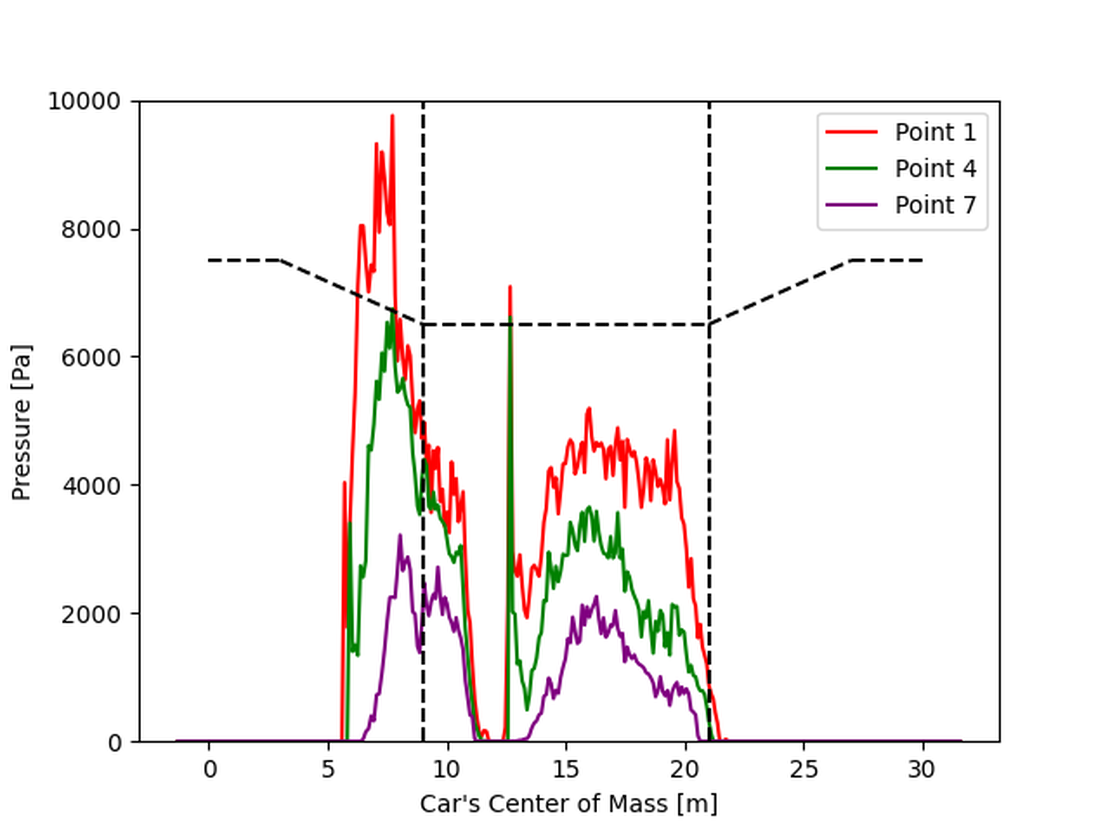
如下方的图片所示,采样点位于车头中央线上,记录随时间变化的压力。 为了提高可比性,图表中未显示压力随时间的变化,而是显示了压力在汽车质心位置(沿x轴方向)上的分布情况。 为了便于定位,图中沿x轴绘制了水道的轮廓。
总体来说,可以看到汽车最低点承受的压力最大,而随着位置升高,压力逐渐减小。 此外,速度越快,车辆整体上会经受的压力越大。
在高速的情况下,压力图显示初始冲击会产生最大的压力。 这种冲击力足以将水从车辆前方推开,形成显著的初始水波。 大约在12米处,汽车追上这个水波,其前端再次与水面接触。
相比在较低速度下,压力峰值要小得多。 由于车辆速度较低,进入水中时产生的主要水波会移动到车前方,导致较少的水聚集在车前。 因此,较慢车辆的压力图显示,在车辆完全进入水道后,7号点大部分时间都与水面没有接触。
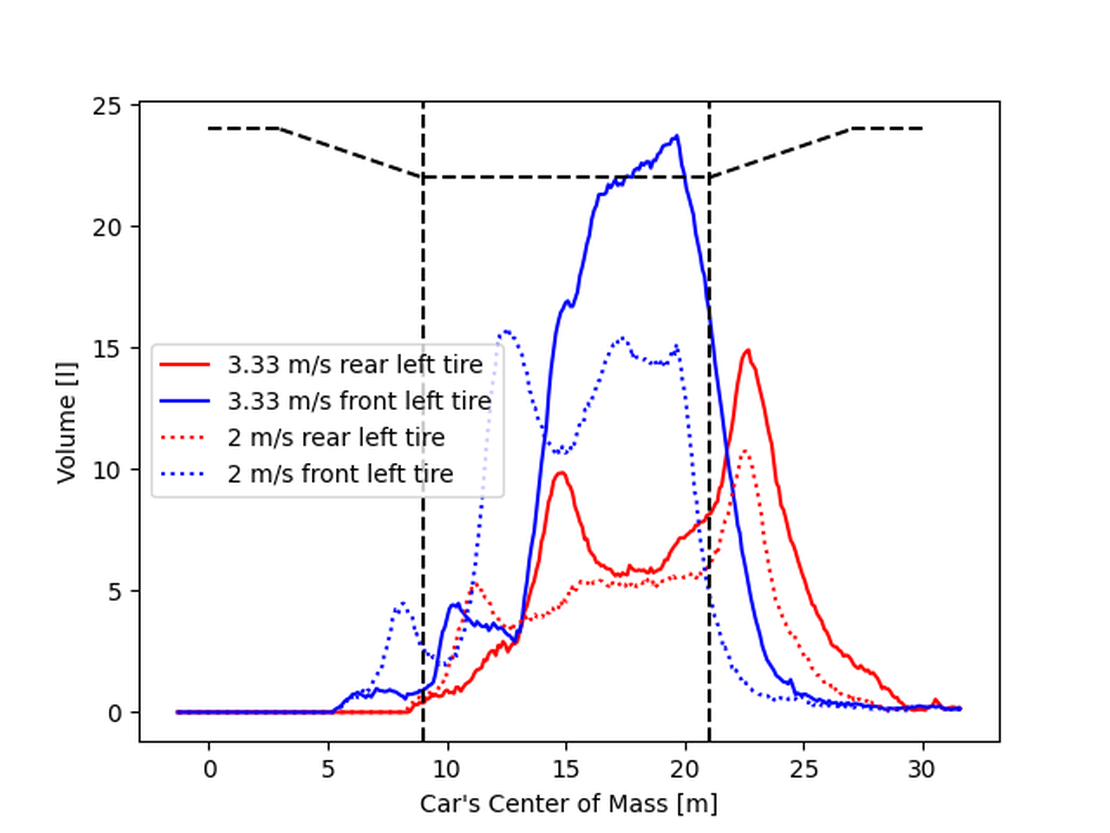
下面这些图展示了体积采样是如何使用的。 在右侧图片中,我们可以看到左轮胎处体积采样的位置。 在图中,显示了车体所在位置的流体体积。 总体来说,前轮需要应对比后轮多得多的水量。 这与上面提到的覆盖率是一致的。 从这张图可以看出,水在车辆前方积聚,而在积水之后,车辆的其他部分则经受了相对较低的水位。
当我们比较高速和低速仿真时,我们观察到了类似的情况:在更高的速度下,前后轮都需要应对更多的水量。
扩展场景:40 cm水深与编队行驶仿真
前述场景以30 cm水深为基准工况。 为探索更为严苛的涉水条件及车辆能力的极限,水深增加至40 cm,车速维持在3.33 m/s。 这一组合代表了显著更具挑战性的工况,并揭示了紧凑型DrivAer模型达到其涉水极限的临界点。
紧凑型乘用车的极限:浮力引起的抬升
在40 cm水深条件下,DrivAer所排开的水量大幅增加。 如下方视频所示,即使在进入水道时,水已经漫过发动机舱盖,甚至超过30 cm工况的程度。 视频中,红色表示覆盖率,反映车辆表面被水润湿的程度。 更大的浸没深度也使车头承受了显著更高的浮力。 结合3.33 m/s行驶速度产生的动压,这些力足以超过车辆前轴载荷。 因此,在行驶约半个水道长度后,车头离地抬起。 由于车辆被设定为后轮驱动,它仍保有驱动力,并在仿真中完成了水道穿越。 然而,从工程角度来看,前轴离地意味着实际失效:车辆变得不可操控,燃油发动机很可能早在此之前便已通过进气口吸入积水,导致驱动力丧失。
这一现象揭示了紧凑型乘用车在深水涉水场景中的根本性限制:相对较低的前轴载荷与有限的离地间隙,使车头在水深超过临界阈值后极易发生浮力引起的抬升。
SUV车型:专为涉水而设计的优势
为提供一款能够应对40 cm水深场景的参考车辆,引入了一款通用SUV几何模型。 与DrivAer相比,该SUV具有更高的离地间隙、更长更宽的车身以及更大的整体质量。 这些特性直接转化为更优的涉水性能。 更重的前轴载荷能够抵抗导致DrivAer抬升的浮力,而更大的车身则将水流逐渐导向两侧,从而降低作用于车辆的净向上压力。 两款车型尺寸参数的对比如下表所示:
| 参数 | SUV | DrivAer模型 |
|---|---|---|
| 离地间隙 | 0.3 m | 0.15 m |
| 轴距 | 3.5 m | 2.8 m |
| 车宽 | 2.1 m | 1.6 m |
| 整备质量 | 2500 kg | 1500 kg |
该SUV在3.33 m/s的速度下成功穿越完整的40 cm水道,全程保持车轮接地。 SUV车头的覆盖率较高,但由于车辆离地间隙较大,水波始终未超过进气系统的临界高度。 此外,水波主要集中在车辆前部,SUV两侧的覆盖率相对较低。
上述特性使SUV成为以下编队行驶场景中适合担任领头车辆的选择。
编队行驶仿真:SUV领航,DrivAer跟随
既然已确定DrivAer在上述工况下超出了其实际涉水极限,随之而来的问题是:协同行驶场景能否改变这一结果。 两辆车被同时纳入仿真,以编队形式行驶,SUV位于前方,乘用车紧随其后,间距约1.3 m。
SUV在穿越水道过程中排开大量水体,在其紧随的尾流区域形成一个水波活动减弱、水面趋于平静的"遮蔽区"。 这一"波影"效应显著降低了尾随车辆所承受的水动力载荷。
处于"波影"遮蔽区内的乘用车所遭遇的水况,更接近30 cm基准工况,而非完整的40 cm水深条件。 直接结果是,前轴所受浮力保持在临界阈值以下,DrivAer在整个水道穿越过程中始终保持车轮接地。
下图展示了作用于底盘的流体力随车辆质心位置变化的曲线。 所示范围为10.5 m至19.5 m,覆盖水道的水平段,不含进出口坡道。 可以明显看出,编队工况下乘用车所受的力甚至低于30 cm基准单车工况。 此外,编队工况下的流体力沿水道方向逐渐增大,在出口处趋近于单车工况水平。 这表明SUV弓形波所排开的水体被导向后方,使尾随乘用车所受的水动力载荷随行进逐步增加。
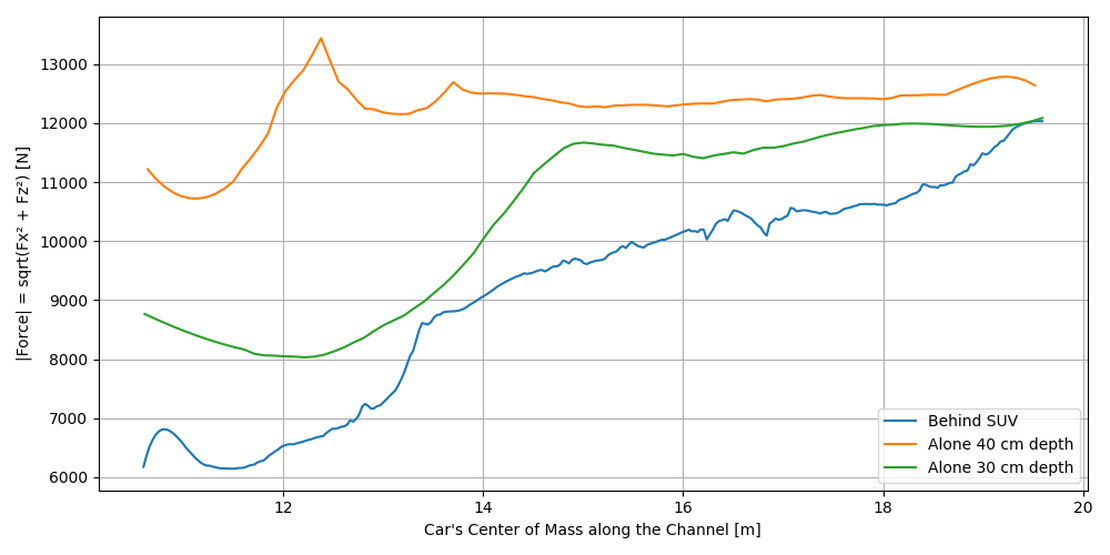
下方对比图并排展示了两种工况下的覆盖率:DrivAer单车40 cm水深工况与相同水深下的编队工况。 两张图像均取自水道中相同位置,即单车工况中前轴即将离地之前的时刻。
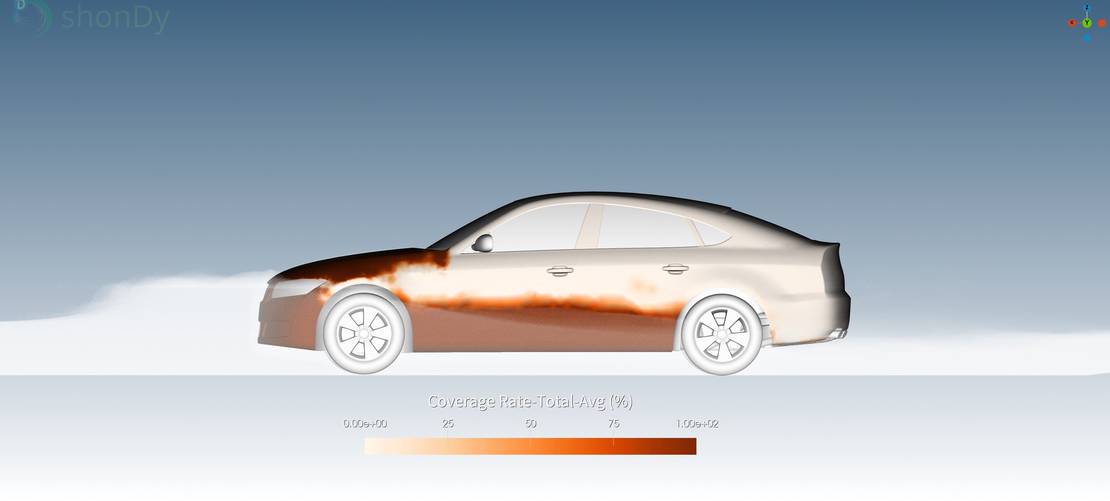
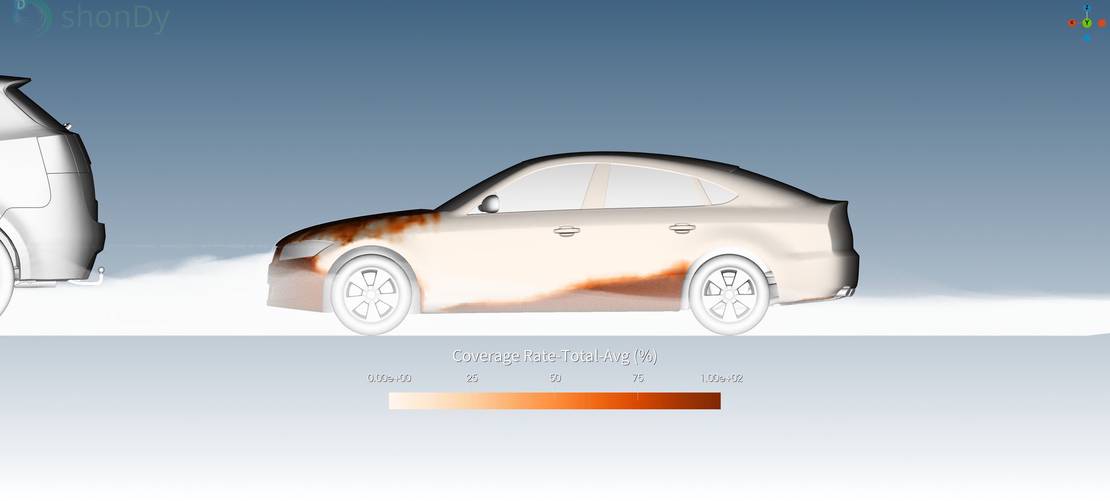
上述结果表明,车辆间的相互作用在评估实际涉水通过能力时是一个不可忽视的重要因素。 编队行驶方案有效地将尾随车辆所承受的水动力载荷降低至与较低严酷度30 cm基准工况相当的水平,从而实现了乘用车单独行驶时无法完成的水道穿越。
渲染可视化
上述分析均采用shonDy的标准可视化方式,以确保工程结果尽可能清晰直观。 下方视频以高质量渲染输出的形式呈现了相同的编队仿真,为上述分析结论提供了直观的视觉总结。